Overview
This project implements a complete CAN communication system between two Texas Instruments Hercules Safety MCUs. The system demonstrates automotive-grade communication protocols, real-time data exchange, and robust error handling mechanisms essential for safety-critical applications.
The implementation includes both hardware and software components, showcasing expertise in embedded systems design, microcontroller programming, and automotive communication standards.
Problem Statement
Automotive and industrial systems require reliable, real-time communication between multiple microcontrollers. The challenges include:
- Implementing robust CAN communication protocol
- Ensuring real-time data exchange with minimal latency
- Handling communication errors and network failures
- Managing multiple message priorities and arbitration
- Integrating with safety-critical automotive systems
Solution
CAN Protocol Implementation
Implemented full CAN 2.0B protocol with message arbitration, error detection, and retransmission mechanisms.
Hardware Integration
Designed and integrated external CAN transceivers with proper signal conditioning and protection circuits.
Real-time Communication
Developed interrupt-driven communication system with priority-based message handling.
Hardware Setup
The following images showcase the actual hardware components used in this CAN network implementation:
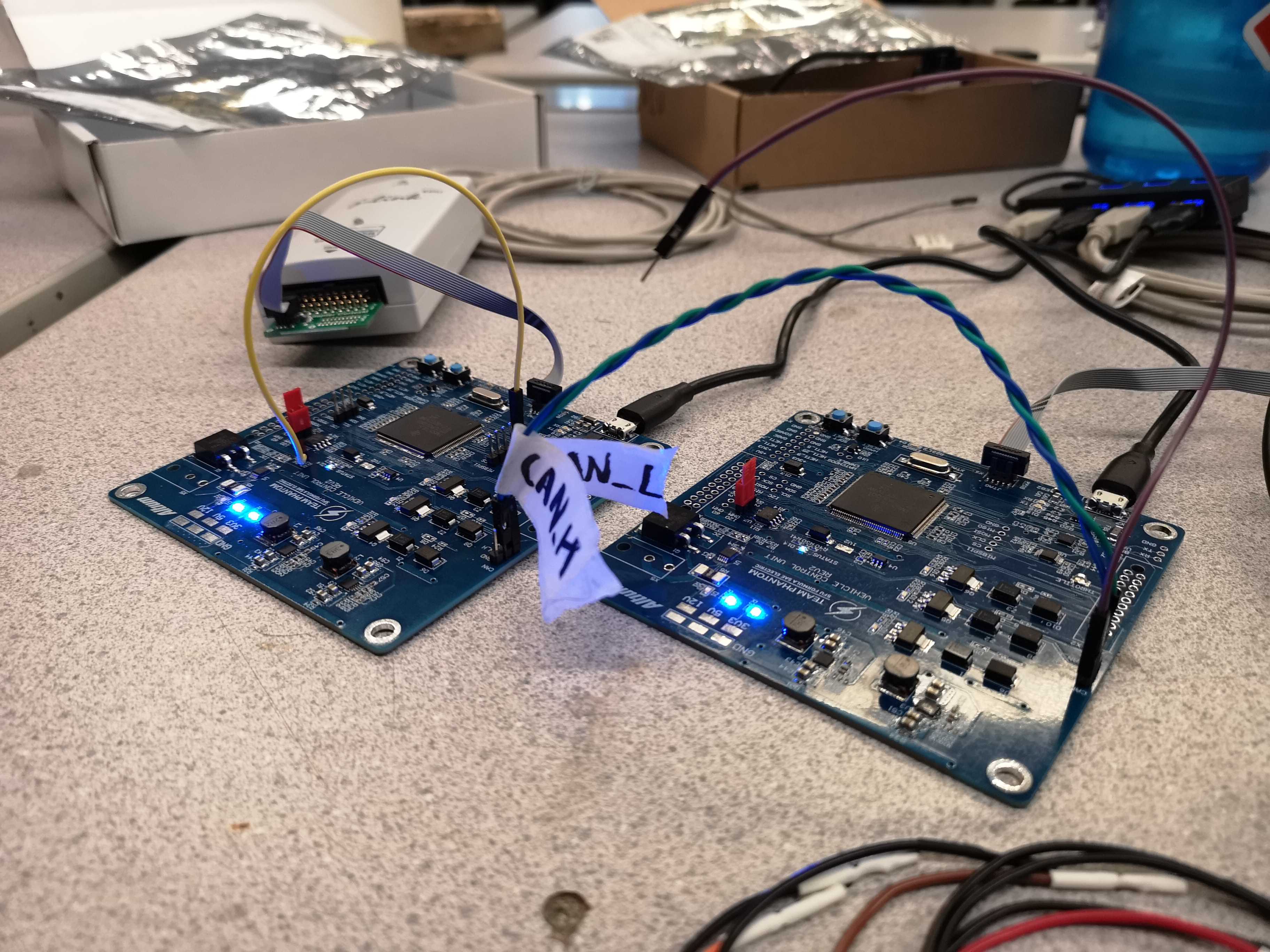
System Architecture
Complete CAN network topology showing both VCU nodes and communication links
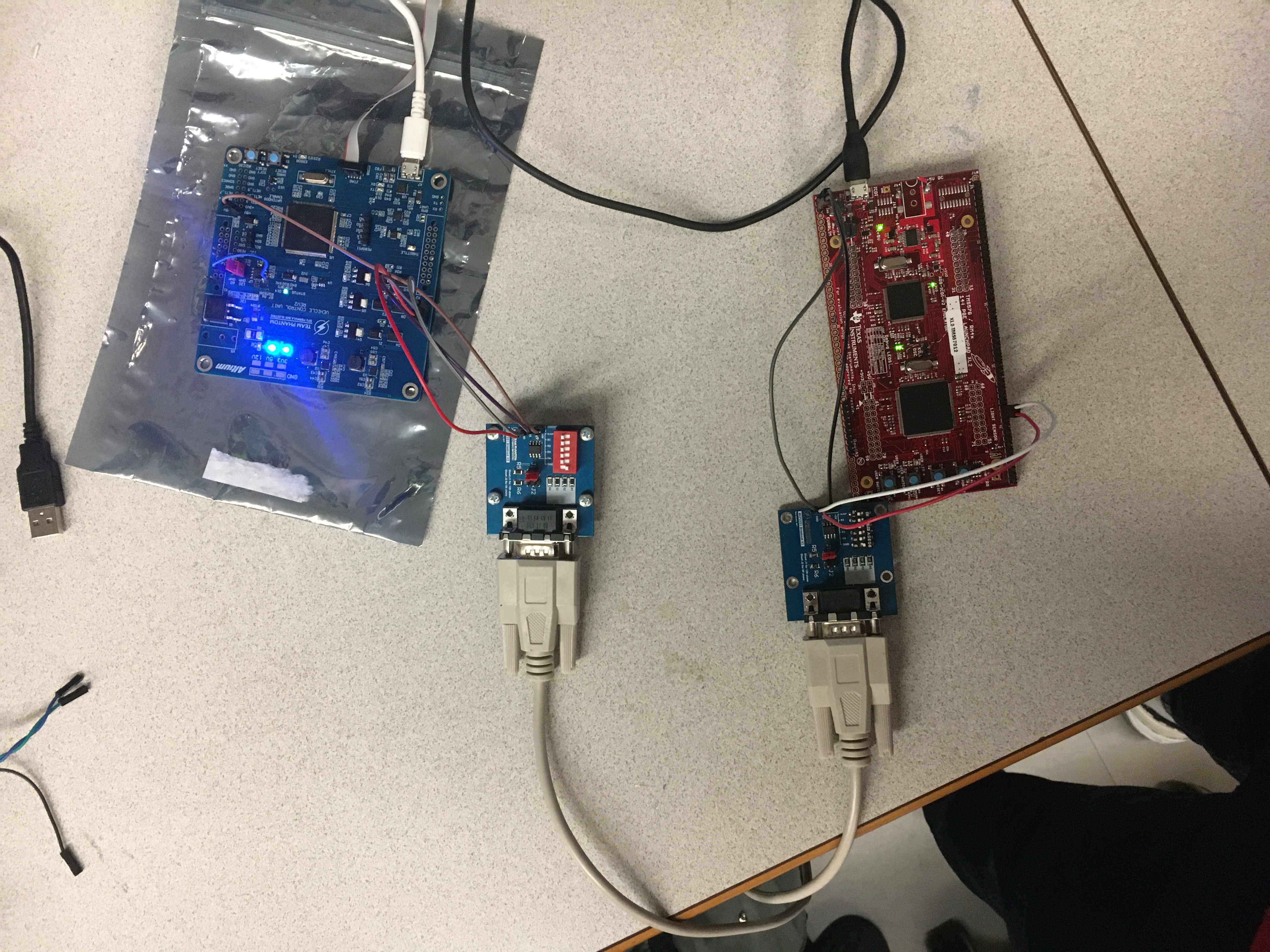
Hercules VCU Setup
TMS570LS1227 Hercules Safety MCU mounted on development launchpad
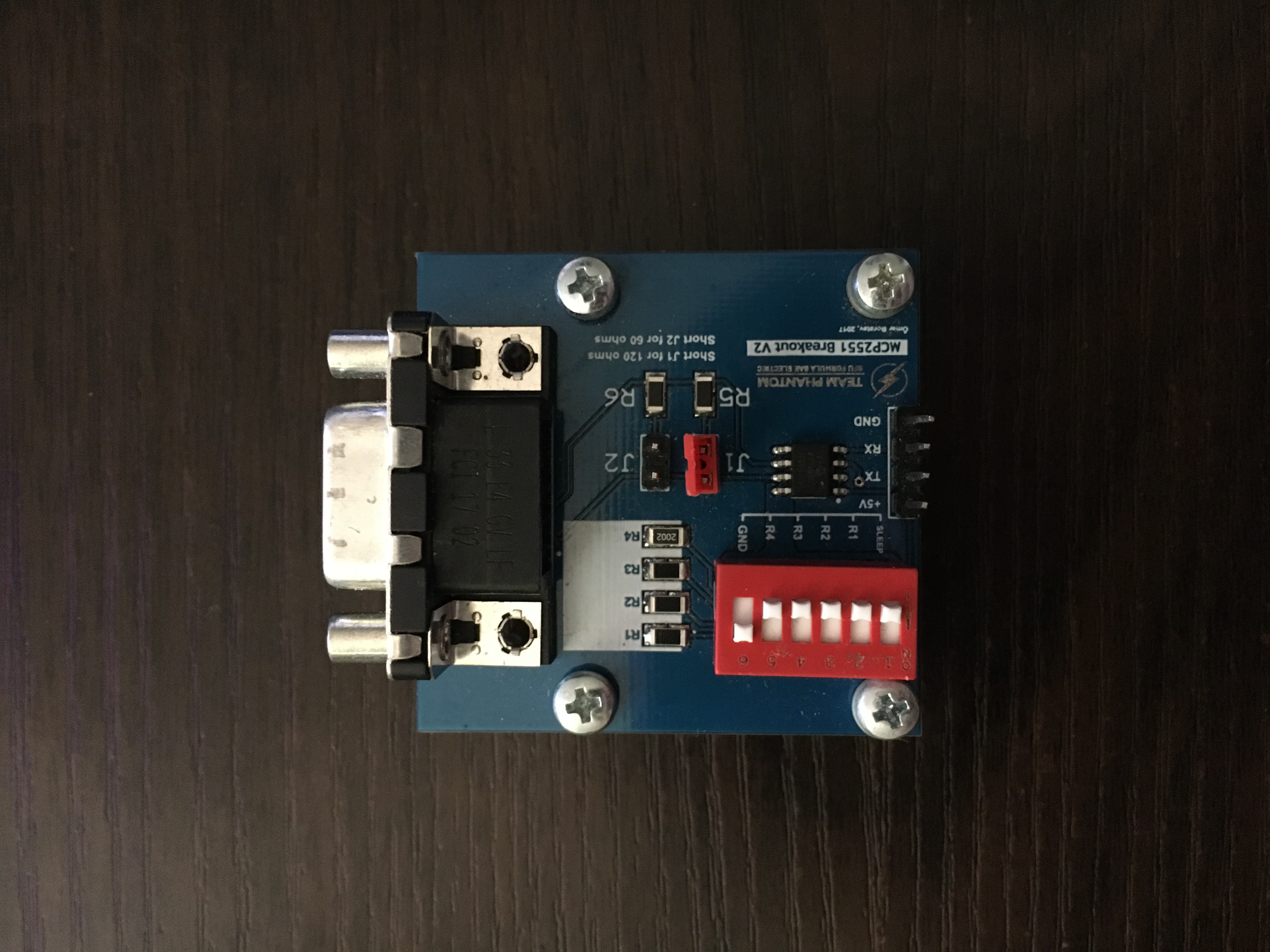
CAN Transceiver
MCP2551 high-speed CAN transceiver providing physical layer communication
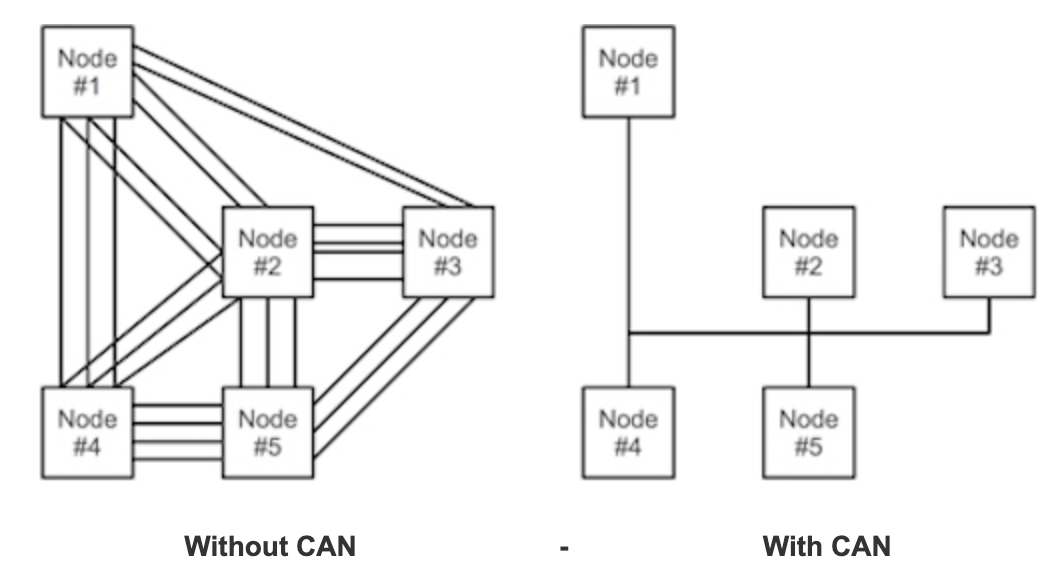
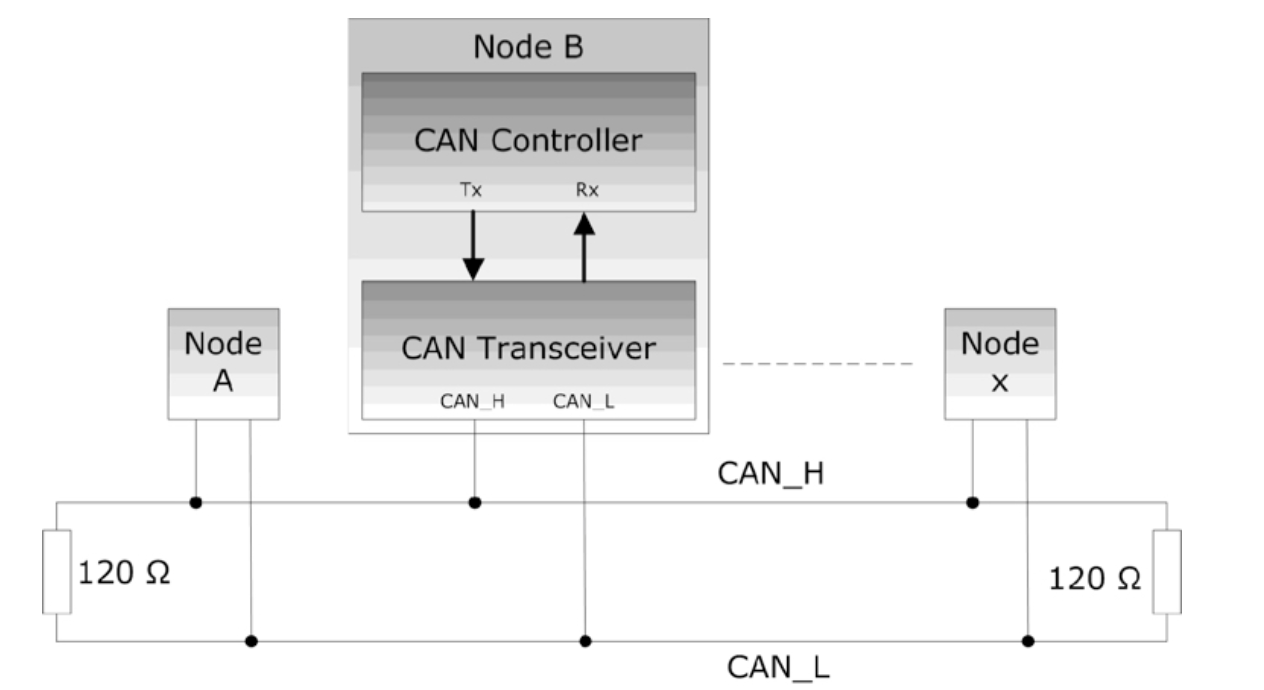
Network Comparison
Comparison showing system architecture with and without CAN communication
Technical Implementation
Hardware Components
- Microcontrollers: TMS570LS1224 and TMS570LS1227 Hercules Safety MCUs
- CAN Transceivers: MCP2551 high-speed CAN transceivers
- Network Topology: Bus topology with termination resistors
- Power Supply: Isolated power supplies for noise immunity
Software Architecture
- CAN Driver: Low-level CAN peripheral configuration and control
- Message Handling: Interrupt-driven message reception and transmission
- Error Management: Comprehensive error detection and recovery mechanisms
- Application Layer: High-level message formatting and protocol implementation
Key Features
- Message Arbitration: Priority-based message transmission
- Error Detection: CRC, bit stuffing, and frame validation
- Retransmission: Automatic retransmission on communication errors
- Real-time Performance: Sub-millisecond message latency
Results & Impact
The project successfully demonstrated reliable CAN communication between two Hercules MCUs with the following achievements:
- Reliable communication at 500 kbps with zero message loss
- Real-time message exchange with < 1ms latency
- Robust error handling with automatic recovery
- Support for multiple message types and priorities
- Compliance with CAN 2.0B protocol specifications
- Ready for integration into automotive safety systems
This implementation showcases advanced embedded systems skills and understanding of automotive communication protocols.
Lessons Learned
- Protocol Design: Importance of proper CAN protocol implementation for reliable communication
- Hardware Integration: Critical role of proper signal conditioning and protection
- Real-time Systems: Interrupt-driven architectures for time-critical applications
- Error Handling: Comprehensive error detection and recovery mechanisms
- Safety Standards: Understanding automotive safety requirements and standards
- Testing: Importance of thorough testing in safety-critical systems